#include <Chord.h>
Public Member Functions | |
| Chord () | |
| virtual | ~Chord () |
| virtual void | initializeOverlay (int stage) |
| Initializes derived-class-attributes. | |
| virtual void | handleTimerEvent (cMessage *msg) |
| virtual void | handleUDPMessage (BaseOverlayMessage *msg) |
| Processes messages from underlay. | |
| virtual void | recordOverlaySentStats (BaseOverlayMessage *msg) |
| Collect overlay specific sent messages statistics. | |
| virtual void | finishOverlay () |
| collects statistical data in derived class | |
| OverlayKey | distance (const OverlayKey &x, const OverlayKey &y, bool useAlternative=false) const |
| This method should implement the distance between two keys. | |
| virtual void | updateTooltip () |
| updates information shown in tk-environment | |
| void | proxCallback (const TransportAddress &node, int rpcId, cPolymorphic *contextPointer, Prox prox) |
 Public Member Functions inherited from BaseOverlay Public Member Functions inherited from BaseOverlay | |
| BaseOverlay () | |
| virtual | ~BaseOverlay () |
| Virtual destructor. | |
| States | getState () |
| bool | isMalicious () |
| Returns true, if node is malicious. | |
| bool | isInSimpleMultiOverlayHost () |
| Returns true if overlay is one in an array, inside a SimpleMultiOverlayHost. | |
| const simtime_t & | getCreationTime () |
| void | join (const OverlayKey &nodeID=OverlayKey::UNSPECIFIED_KEY) |
| Join the overlay with a given nodeID. | |
| virtual NodeVector * | local_lookup (const OverlayKey &key, int num, bool safe) |
| finds nodes closest to the given OverlayKey | |
| virtual NodeVector * | neighborSet (int num) |
| void | sendMessageToUDP (const TransportAddress &dest, cPacket *msg, simtime_t delay=SIMTIME_ZERO) |
| Sends message to underlay. | |
| void | sendToKey (const OverlayKey &key, BaseOverlayMessage *message, int numSiblings=1, const std::vector< TransportAddress > &sourceRoute=TransportAddress::UNSPECIFIED_NODES, RoutingType routingType=DEFAULT_ROUTING) |
| Sends a message to an overlay node, with the generic routing algorithm. | |
| void | registerComp (CompType compType, cModule *module) |
| cModule * | getCompModule (CompType compType) |
| cGate * | getCompRpcGate (CompType compType) |
| void | sendMessageToAllComp (cMessage *msg, CompType srcComp) |
| bool | providesKbr () |
| virtual uint8_t | getBitsPerDigit () |
| bool | getMeasureAuthBlock () |
| BootstrapList & | getBootstrapList () const |
| virtual OverlayKey | estimateMeanDistance () |
| returns mean distance between OverlayKeys in the network | |
| virtual uint32_t | estimateOverlaySize () |
| estimates the current number of nodes online | |
| Public Member Functions inherited from BaseRpc | |
| BaseRpc () | |
| const NodeHandle & | getThisNode () |
| Returns the NodeHandle of this node. | |
| simtime_t | getUdpTimeout () |
| Public Member Functions inherited from RpcListener | |
| virtual | ~RpcListener () |
| destructor | |
| Public Member Functions inherited from BaseTcpSupport | |
| virtual void | socketDataArrived (int connId, void *yourPtr, cPacket *msg, bool urgent) |
| virtual void | socketEstablished (int connId, void *yourPtr) |
| virtual void | socketPeerClosed (int connId, void *yourPtr) |
| virtual void | socketFailure (int connId, void *yourPtr, int code) |
| virtual void | socketStatusArrived (int connId, void *yourPtr, TCPStatusInfo *status) |
| Public Member Functions inherited from TopologyVis | |
| TopologyVis () | |
| void | showOverlayNeighborArrow (const NodeHandle &neighbor, bool flush=true, const char *displayString=NULL) |
| Draws an arrow from this node to neighbor. | |
| void | deleteOverlayNeighborArrow (const NodeHandle &neighbor) |
| Removes an arrow from this node to neighbor. | |
Protected Member Functions | |
| virtual void | changeState (int toState) |
| changes node state | |
| virtual void | handleJoinTimerExpired (cMessage *msg) |
| handle a expired join timer | |
| virtual void | handleStabilizeTimerExpired (cMessage *msg) |
| handle a expired stabilize timer | |
| virtual void | handleFixFingersTimerExpired (cMessage *msg) |
| handle a expired fix_fingers timer | |
| virtual void | handleNewSuccessorHint (ChordMessage *chordMsg) |
| handle a received NEWSUCCESSORHINT message | |
| virtual NodeVector * | closestPreceedingNode (const OverlayKey &key) |
| looks up the finger table and returns the closest preceeding node. | |
| virtual void | findFriendModules () |
| Assigns the finger table and successor list module to our reference. | |
| virtual void | initializeFriendModules () |
| initializes finger table and successor list | |
| virtual bool | handleRpcCall (BaseCallMessage *msg) |
| Processes Remote-Procedure-Call invocation messages. | |
| NodeVector * | findNode (const OverlayKey &key, int numRedundantNodes, int numSiblings, BaseOverlayMessage *msg) |
| Implements the find node call. | |
| virtual void | joinOverlay () |
| Join the overlay with a given nodeID in thisNode.key. | |
| virtual void | joinForeignPartition (const NodeHandle &node) |
| Join another overlay partition with the given node as bootstrap node. | |
| virtual bool | isSiblingFor (const NodeHandle &node, const OverlayKey &key, int numSiblings, bool *err) |
| Query if a node is among the siblings for a given key. | |
| int | getMaxNumSiblings () |
| Query the maximum number of siblings (nodes close to a key) that are maintained by this overlay protocol. | |
| int | getMaxNumRedundantNodes () |
| Query the maximum number of redundant next hop nodes that are returned by findNode(). | |
| void | rpcFixfingers (FixfingersCall *call) |
| Fixfingers Remote-Procedure-Call. | |
| virtual void | rpcJoin (JoinCall *call) |
| Join Remote-Procedure-Call. | |
| virtual void | rpcNotify (NotifyCall *call) |
| NOTIFY Remote-Procedure-Call. | |
| void | rpcStabilize (StabilizeCall *call) |
| STABILIZE Remote-Procedure-Call. | |
| virtual void | handleRpcResponse (BaseResponseMessage *msg, cPolymorphic *context, int rpcId, simtime_t rtt) |
| This method is called if an RPC response has been received. | |
| virtual void | handleRpcTimeout (BaseCallMessage *msg, const TransportAddress &dest, cPolymorphic *context, int rpcId, const OverlayKey &destKey) |
| This method is called if an RPC timeout has been reached. | |
| virtual void | pingResponse (PingResponse *pingResponse, cPolymorphic *context, int rpcId, simtime_t rtt) |
| virtual void | pingTimeout (PingCall *pingCall, const TransportAddress &dest, cPolymorphic *context, int rpcId) |
| virtual void | handleRpcJoinResponse (JoinResponse *joinResponse) |
| virtual void | handleRpcNotifyResponse (NotifyResponse *notifyResponse) |
| virtual void | handleRpcStabilizeResponse (StabilizeResponse *stabilizeResponse) |
| virtual void | handleRpcFixfingersResponse (FixfingersResponse *fixfingersResponse, double rtt=-1) |
| virtual bool | handleFailedNode (const TransportAddress &failed) |
| Handles a failed node. | |
| Protected Member Functions inherited from BaseOverlay | |
| int | numInitStages () const |
| Sets init stage. | |
| void | bindToPort (int port) |
| Tells UDP we want to get all packets arriving on the given port. | |
| virtual void | route (const OverlayKey &key, CompType destComp, CompType srcComp, cPacket *msg, const std::vector< TransportAddress > &sourceRoute=TransportAddress::UNSPECIFIED_NODES, RoutingType routingType=DEFAULT_ROUTING) |
| Routes message through overlay. | |
| void | callDeliver (BaseOverlayMessage *msg, const OverlayKey &destKey) |
| Calls deliver function in application. | |
| void | callForward (const OverlayKey &key, BaseRouteMessage *msg, const NodeHandle &nextHopNode) |
| Calls forward function in application. | |
| void | callUpdate (const NodeHandle &node, bool joined) |
| Informs application about state changes of nodes or newly joined nodes. | |
| void | handleMessage (cMessage *msg) |
| Checks for message type and calls corresponding method. | |
| void | handleBaseOverlayMessage (BaseOverlayMessage *msg, const OverlayKey &destKey=OverlayKey::UNSPECIFIED_KEY) |
| Handles a BaseOverlayMessage | |
| virtual void | handleAppMessage (cMessage *msg) |
| Processes "timer" self-messages. | |
| virtual void | receiveChangeNotification (int category, const cPolymorphic *details) |
| callback-method for events at the NotificationBoard | |
| virtual void | handleTransportAddressChangedNotification () |
| This method gets call if the node has a new TransportAddress (IP address) because he changed his access network. | |
| virtual void | handleNodeLeaveNotification () |
| This method gets call **.gracefulLeaveDelay seconds before it is killed. | |
| virtual void | handleNodeGracefulLeaveNotification () |
| This method gets call **.gracefulLeaveDelay seconds before it is killed if this node is among the gracefulLeaveProbability nodes. | |
| void | setOverlayReady (bool ready) |
| Sets the overlay ready icon and register/deregisters the node at the GlobalNodeList. | |
| virtual AbstractLookup * | createLookup (RoutingType routingType=DEFAULT_ROUTING, const BaseOverlayMessage *msg=NULL, const cPacket *findNodeExt=NULL, bool appLookup=false) |
| Creates an abstract iterative lookup instance. | |
| virtual void | removeLookup (AbstractLookup *lookup) |
| Removes the abstract lookup instance. | |
| virtual void | lookupRpc (LookupCall *call) |
| virtual void | nextHopRpc (NextHopCall *call) |
| void | countFindNodeCall (const FindNodeCall *call) |
| void | countFailedNodeCall (const FailedNodeCall *call) |
| bool | internalHandleRpcCall (BaseCallMessage *msg) |
| Handles internal rpc requests. | |
| void | internalHandleRpcResponse (BaseResponseMessage *msg, cPolymorphic *context, int rpcId, simtime_t rtt) |
| Handles rpc responses internal in base classes | |
| void | internalHandleRpcTimeout (BaseCallMessage *msg, const TransportAddress &dest, cPolymorphic *context, int rpcId, const OverlayKey &destKey) |
| Handles rpc timeouts internal in base classes | |
| void | internalSendRouteRpc (BaseRpcMessage *message, const OverlayKey &destKey, const std::vector< TransportAddress > &sourceRoute, RoutingType routingType) |
| CompType | getThisCompType () |
| Return the component type of this module. | |
| Protected Member Functions inherited from BaseRpc | |
| void | initRpcs () |
| Initializes Remote-Procedure state. | |
| void | finishRpcs () |
| Deinitializes Remote-Procedure state. | |
| virtual void | internalHandleRpcMessage (BaseRpcMessage *msg) |
| Handles incoming rpc messages and delegates them to the corresponding listeners or handlers. | |
| uint32_t | sendRouteRpcCall (CompType destComp, const TransportAddress &dest, const OverlayKey &destKey, BaseCallMessage *msg, cPolymorphic *context=NULL, RoutingType routingType=DEFAULT_ROUTING, simtime_t timeout=-1, int retries=0, int rpcId=-1, RpcListener *rpcListener=NULL) |
| Routes a Remote-Procedure-Call message to an OverlayKey. | |
| uint32_t | sendRouteRpcCall (CompType destComp, const OverlayKey &destKey, BaseCallMessage *msg, cPolymorphic *context=NULL, RoutingType routingType=DEFAULT_ROUTING, simtime_t timeout=-1, int retries=0, int rpcId=-1, RpcListener *rpcListener=NULL) |
| Routes a Remote-Procedure-Call message to an OverlayKey. | |
| uint32_t | sendRouteRpcCall (CompType destComp, const TransportAddress &dest, BaseCallMessage *msg, cPolymorphic *context=NULL, RoutingType routingType=DEFAULT_ROUTING, simtime_t timeout=-1, int retries=0, int rpcId=-1, RpcListener *rpcListener=NULL) |
| Sends a Remote-Procedure-Call message using the overlay's UDP port This replaces ROUTE_DIRECT calls! | |
| uint32_t | sendUdpRpcCall (const TransportAddress &dest, BaseCallMessage *msg, cPolymorphic *context=NULL, simtime_t timeout=-1, int retries=0, int rpcId=-1, RpcListener *rpcListener=NULL) |
| Sends a Remote-Procedure-Call message to the underlay | |
| uint32_t | sendInternalRpcCall (CompType destComp, BaseCallMessage *msg, cPolymorphic *context=NULL, simtime_t timeout=-1, int retries=0, int rpcId=-1, RpcListener *rpcListener=NULL) |
| Sends an internal Remote-Procedure-Call between two tiers | |
| void | cancelRpcMessage (uint32_t nonce) |
| Cancels a Remote-Procedure-Call. | |
| void | cancelAllRpcs () |
| Cancels all RPCs. | |
| void | sendRpcResponse (TransportType transportType, CompType destComp, const TransportAddress &dest, const OverlayKey &destKey, BaseCallMessage *call, BaseResponseMessage *response) |
| Send Remote-Procedure response message and deletes call message. | |
| void | sendRpcResponse (BaseCallMessage *call, BaseResponseMessage *response) |
| Send Remote-Procedure response message to UDP and deletes call message. | |
| int | pingNode (const TransportAddress &dest, simtime_t timeout=-1, int retries=0, cPolymorphic *context=NULL, const char *caption="PING", RpcListener *rpcListener=NULL, int rpcId=-1, TransportType transportType=INVALID_TRANSPORT) |
| ping a node by its TransportAddress | |
| bool | internalHandleMessage (cMessage *msg) |
| Protected Member Functions inherited from RpcListener | |
| virtual void | handleRpcResponse (BaseResponseMessage *msg, const RpcState &rpcState, simtime_t rtt) |
| This method is called if an RPC response has been received. | |
| virtual void | handleRpcTimeout (const RpcState &rpcState) |
| This method is called if an RPC timeout has been reached. | |
| Protected Member Functions inherited from BaseTcpSupport | |
| void | handleTCPMessage (cMessage *msg) |
| Member function to handle incoming TCP messages. | |
| void | bindAndListenTcp (int port) |
| Member function to bind service to the specified port and listen afterwards. | |
| bool | isAlreadyConnected (TransportAddress address) |
| Member function to check if the service is already connected. | |
| void | establishTcpConnection (TransportAddress address) |
| Member function to establish a connection to the specified node. | |
| void | sendTcpData (cPacket *msg, TransportAddress address) |
| Member function to send TCP data to the specified node. | |
| virtual void | handleConnectionEvent (EvCode code, TransportAddress address) |
| Member function to handle passive connection events. | |
| virtual void | handleDataReceived (TransportAddress address, cPacket *msg, bool urgent) |
| Member function to handle incoming data. | |
| virtual void | handleIncomingConnection (TransportAddress address) |
| Member function to handle newly opened connections. | |
| void | closeTcpConnection (TransportAddress address) |
| Member function to close an established connection. | |
| void | setTcpOut (cGate *gate) |
| Member function to set local gate towards the TCP module during init phase. | |
| cGate * | getTcpOut () |
| Member function to get local gate towards the TCP module. | |
| Protected Member Functions inherited from TopologyVis | |
| void | initVis (cModule *terminal) |
Protected Attributes | |
| int | joinRetry |
| int | stabilizeRetry |
| // retries before neighbor considered failed | |
| double | joinDelay |
| double | stabilizeDelay |
| stabilize interval (secs) | |
| double | fixfingersDelay |
| double | checkPredecessorDelay |
| int | successorListSize |
| bool | aggressiveJoinMode |
| use modified (faster) JOIN protocol | |
| bool | extendedFingerTable |
| unsigned int | numFingerCandidates |
| bool | proximityRouting |
| bool | memorizeFailedSuccessor |
| bool | newChordFingerTable |
| bool | mergeOptimizationL1 |
| bool | mergeOptimizationL2 |
| bool | mergeOptimizationL3 |
| bool | mergeOptimizationL4 |
| cMessage * | join_timer |
| cMessage * | stabilize_timer |
| cMessage * | fixfingers_timer |
| cMessage * | checkPredecessor_timer |
| int | joinCount |
| int | stabilizeCount |
| int | fixfingersCount |
| int | notifyCount |
| int | newsuccessorhintCount |
| int | joinBytesSent |
| int | stabilizeBytesSent |
| int | notifyBytesSent |
| int | fixfingersBytesSent |
| int | newsuccessorhintBytesSent |
| int | keyLength |
| length of an overlay key in bits | |
| int | missingPredecessorStabRequests |
| missing StabilizeCall msgs | |
| NodeHandle | predecessorNode |
| predecessor of this node | |
| TransportAddress | bootstrapNode |
| node used to bootstrap | |
| ChordFingerTable * | fingerTable |
| pointer to this node's finger table | |
| ChordSuccessorList * | successorList |
| pointer to this node's successor list | |
| Protected Attributes inherited from BaseOverlay | |
| int | numAppDataForwarded |
| number of forwarded app data packets | |
| int | bytesAppDataForwarded |
| number of forwarded app data bytes at out-gate | |
| int | numAppLookupForwarded |
| number of forwarded app lookup packets | |
| int | bytesAppLookupForwarded |
| number of forwarded app lookup bytes at out-gate | |
| int | numMaintenanceForwarded |
| number of forwarded maintenance packets | |
| int | bytesMaintenanceForwarded |
| number of forwarded maintenance bytes at out-gate | |
| int | numFindNodeSent |
| int | bytesFindNodeSent |
| int | numFindNodeResponseSent |
| int | bytesFindNodeResponseSent |
| int | numFailedNodeSent |
| int | bytesFailedNodeSent |
| int | numFailedNodeResponseSent |
| int | bytesFailedNodeResponseSent |
| std::vector< HopDelayRecord * > | singleHopDelays |
| simtime_t | creationTime |
| simtime when the node has been created | |
| GlobalNodeList * | globalNodeList |
| pointer to GlobalNodeList in this node | |
| NotificationBoard * | notificationBoard |
| pointer to NotificationBoard in this node | |
| UnderlayConfigurator * | underlayConfigurator |
| pointer to UnderlayConfigurator in this node | |
| BootstrapList * | bootstrapList |
| pointer to the BootstrapList module | |
| GlobalParameters * | globalParameters |
| pointer to the GlobalParameters module | |
| uint32_t | overlayId |
| identifies the overlay this node belongs to (used for multiple overlays) | |
| bool | debugOutput |
| debug output ? | |
| RoutingType | defaultRoutingType |
| bool | useCommonAPIforward |
| forward messages to applications? | |
| bool | collectPerHopDelay |
| collect delay for single hops | |
| bool | routeMsgAcks |
| send ACK when receiving route message | |
| uint32_t | recNumRedundantNodes |
| numRedundantNodes for recursive routing | |
| bool | recordRoute |
| record visited hops on route | |
| bool | drawOverlayTopology |
| bool | rejoinOnFailure |
| bool | sendRpcResponseToLastHop |
| needed by KBR protocols for NAT support | |
| bool | dropFindNodeAttack |
| if node is malicious, it tries a findNode attack | |
| bool | isSiblingAttack |
| if node is malicious, it tries a isSibling attack | |
| bool | invalidNodesAttack |
| if node is malicious, it tries a invalidNode attack | |
| bool | dropRouteMessageAttack |
| if node is malicious, it drops all received BaseRouteMessages | |
| int | localPort |
| used UDP-port | |
| int | hopCountMax |
| maximum hop count | |
| bool | measureAuthBlock |
| if true, measure the overhead of signatures in rpc messages | |
| bool | restoreContext |
| if true, a node rejoins with its old nodeId and malicious state | |
| int | numDropped |
| number of dropped packets | |
| int | bytesDropped |
| number of dropped bytes | |
| cOutVector | delayVector |
| statistical output vector for packet-delays | |
| cOutVector | hopCountVector |
| statistical output vector for hop-counts | |
| States | state |
| IterativeLookupConfiguration | iterativeLookupConfig |
| RecursiveLookupConfiguration | recursiveLookupConfig |
| LookupSet | lookups |
| bool | kbr |
| set this to true, if the overlay provides KBR services | |
| Protected Attributes inherited from BaseRpc | |
| NodeHandle | thisNode |
| NodeHandle to this node. | |
| BaseOverlay * | overlay |
| bool | debugOutput |
| debug output ? | |
| GlobalStatistics * | globalStatistics |
| pointer to GlobalStatistics module in this node | |
| CompType | thisCompType |
| NeighborCache * | neighborCache |
| pointer to the neighbor cache | |
| CryptoModule * | cryptoModule |
| pointer to CryptoModule | |
| int | numPingSent |
| int | bytesPingSent |
| int | numPingResponseSent |
| int | bytesPingResponseSent |
| Protected Attributes inherited from TopologyVis | |
| cModule * | thisTerminal |
| GlobalNodeList * | globalNodeList |
| pointer to corresponding node | |
Private Attributes | |
| TransportAddress | failedSuccessor |
Friends | |
| class | ChordSuccessorList |
| class | ChordFingerTable |
Additional Inherited Members | |
| Public Types inherited from BaseOverlay | |
| enum | States { INIT = 0, BOOTSTRAP = 1, DISCOVERY = 2, PREJOIN = 3, JOIN = 4, POSTJOIN = 5, READY = 6, REFRESH = 7, SHUTDOWN = 8, FAILED = 9, RSET = JOIN, BSET = POSTJOIN } |
| Protected Types inherited from BaseOverlay | |
| typedef UNORDERED_SET < AbstractLookup *, lookupHashFcn, lookupHashFcn > | LookupSet |
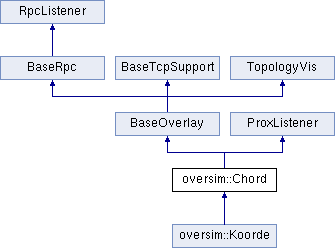
Detailed Description
Chord overlay module.
Implementation of the Chord KBR overlay as described in "Chord: A Scalable Peer-to-Peer Lookup Protocol for Inetnet Applications" by I. Stoica et al. published in Transactions on Networking.
- See Also
- BaseOverlay, ChordFingerTable, ChordSuccessorList
Constructor & Destructor Documentation
| oversim::Chord::Chord | ( | ) |
|
virtual |
Definition at line 119 of file Chord.cc.
Member Function Documentation
|
protectedvirtual |
changes node state
- Parameters
-
toState state to change to
Reimplemented in oversim::Koorde.
Definition at line 154 of file Chord.cc.
|
protectedvirtual |
looks up the finger table and returns the closest preceeding node.
- Parameters
-
key key to find the closest preceeding node for
- Returns
- node vector of the closest preceeding nodes to key
Definition at line 604 of file Chord.cc.
|
virtual |
This method should implement the distance between two keys.
It may be overloaded to implement a new metric. The default implementation uses the standard-metric d = abs(x-y).
- Parameters
-
x Left-hand-side Key y Right-hand-side key useAlternative use an alternative distance metric
- Returns
- OverlayKey Distance between x and y
Reimplemented from BaseOverlay.
|
protectedvirtual |
Assigns the finger table and successor list module to our reference.
Reimplemented in oversim::Koorde.
Definition at line 1362 of file Chord.cc.
|
protectedvirtual |
Implements the find node call.
This method simply returns the closest nodes known in the corresponding routing topology. If the node is a sibling for this key (isSiblingFor(key) = true), this method returns all numSiblings siblings, with the closest neighbor to the key first.
- Parameters
-
key The lookup key. numRedundantNodes Maximum number of next hop nodes to return. numSiblings number of siblings to return msg A pointer to the BaseRouteMessage or FindNodeCall message of this lookup.
- Returns
- NodeVector with closest nodes.
Reimplemented from BaseOverlay.
Reimplemented in oversim::Koorde.
Definition at line 550 of file Chord.cc.
|
virtual |
collects statistical data in derived class
Reimplemented from BaseOverlay.
Reimplemented in oversim::Koorde.
Definition at line 728 of file Chord.cc.
|
protectedvirtual |
Query the maximum number of redundant next hop nodes that are returned by findNode().
- Returns
- int number of redundant nodes returned by findNode().
Reimplemented from BaseOverlay.
|
protectedvirtual |
Query the maximum number of siblings (nodes close to a key) that are maintained by this overlay protocol.
- Returns
- int number of siblings.
Reimplemented from BaseOverlay.
|
protectedvirtual |
Handles a failed node.
This method is called whenever a node given by findNode() was unreachable. The default implementation does nothing at all.
- Parameters
-
failed the failed node
- Returns
- true if lookup should retry here
Reimplemented from BaseOverlay.
Reimplemented in oversim::Koorde.
Definition at line 504 of file Chord.cc.
|
protectedvirtual |
handle a expired fix_fingers timer
- Parameters
-
msg the timer self-message
Definition at line 847 of file Chord.cc.
|
protectedvirtual |
handle a expired join timer
- Parameters
-
msg the timer self-message
Definition at line 760 of file Chord.cc.
|
protectedvirtual |
handle a received NEWSUCCESSORHINT message
- Parameters
-
chordMsg the message to process
Definition at line 880 of file Chord.cc.
|
protectedvirtual |
Processes Remote-Procedure-Call invocation messages.
This method should be overloaded when the overlay provides RPC functionality.
- Returns
- true, if rpc has been handled
Reimplemented from BaseRpc.
Reimplemented in oversim::Koorde.
Definition at line 296 of file Chord.cc.
|
protectedvirtual |
Definition at line 1259 of file Chord.cc.
|
protectedvirtual |
Reimplemented in oversim::Koorde.
Definition at line 990 of file Chord.cc.
|
protectedvirtual |
Definition at line 1194 of file Chord.cc.
|
protectedvirtual |
This method is called if an RPC response has been received.
- Parameters
-
msg The response message. context Pointer to an optional state object. The object has to be handled/deleted by the handleRpcResponse() code rpcId The RPC id. rtt The Round-Trip-Time of this RPC
Reimplemented from RpcListener.
Reimplemented in oversim::Koorde.
Definition at line 318 of file Chord.cc.
|
protectedvirtual |
Definition at line 1074 of file Chord.cc.
|
protectedvirtual |
This method is called if an RPC timeout has been reached.
- Parameters
-
msg The original RPC message. dest The destination node context Pointer to an optional state object. The object has to be handled/deleted by the handleRpcResponse() code rpcId The RPC id. destKey the destination OverlayKey
Reimplemented from RpcListener.
Reimplemented in oversim::Koorde.
Definition at line 362 of file Chord.cc.
|
protectedvirtual |
handle a expired stabilize timer
- Parameters
-
msg the timer self-message
Definition at line 795 of file Chord.cc.
|
virtual |
Reimplemented from BaseRpc.
Reimplemented in oversim::Koorde.
Definition at line 251 of file Chord.cc.
|
virtual |
Processes messages from underlay.
- Parameters
-
msg Message from UDP
Reimplemented from BaseOverlay.
Reimplemented in oversim::Koorde.
Definition at line 280 of file Chord.cc.
|
protectedvirtual |
initializes finger table and successor list
Reimplemented in oversim::Koorde.
Definition at line 1372 of file Chord.cc.
|
virtual |
Initializes derived-class-attributes.
Initializes derived-class-attributes, called by BaseOverlay::initialize(). By default this method is called once. If more stages are needed one can overload numInitStages() and add more stages.
- Parameters
-
stage the init stage
Reimplemented from BaseOverlay.
Reimplemented in oversim::Koorde.
Definition at line 48 of file Chord.cc.
|
protectedvirtual |
Query if a node is among the siblings for a given key.
Query if a node is among the siblings for a given key. This means, that the nodeId of this node is among the closest numSiblings nodes to the key and that by a local findNode() call all other siblings to this key can be retrieved.
- Parameters
-
node the NodeHandle key destination key numSiblings The nodes knows all numSiblings nodes close to this key err return false if the range could not be determined
- Returns
- bool true, if the node is responsible for the key.
Reimplemented from BaseOverlay.
Definition at line 424 of file Chord.cc.
|
protectedvirtual |
Join another overlay partition with the given node as bootstrap node.
Join another overlay partition with the given node as bootstrap node. This method is called to join a foreign overlay partition and start the merging process.
- Parameters
-
node The foreign bootstrap node
Reimplemented from BaseOverlay.
Definition at line 137 of file Chord.cc.
|
protectedvirtual |
Join the overlay with a given nodeID in thisNode.key.
Join the overlay with a given nodeID in thisNode.key. This method may be called by an application to join the overlay with a specific nodeID. It is also called if the node's IP address changes.
Reimplemented from BaseOverlay.
|
protectedvirtual |
|
protectedvirtual |
|
virtual |
Implements ProxListener.
Definition at line 1325 of file Chord.cc.
|
virtual |
Collect overlay specific sent messages statistics.
This method is called from BaseOverlay::sendMessageToUDP() for every overlay message that is sent by a node. Use this to collect statistical data for overlay protocol specific message types.
- Parameters
-
msg The overlay message to be sent to the UDP layer
Reimplemented from BaseOverlay.
Reimplemented in oversim::Koorde.
Definition at line 678 of file Chord.cc.
|
protected |
Fixfingers Remote-Procedure-Call.
- Parameters
-
call RPC Parameter Message
Definition at line 1230 of file Chord.cc.
|
protectedvirtual |
Join Remote-Procedure-Call.
- Parameters
-
call RPC Parameter Message
Reimplemented in oversim::Koorde.
Definition at line 919 of file Chord.cc.
|
protectedvirtual |
NOTIFY Remote-Procedure-Call.
- Parameters
-
call RPC Parameter Message
Definition at line 1108 of file Chord.cc.
|
protected |
STABILIZE Remote-Procedure-Call.
- Parameters
-
call RPC Parameter Message
Definition at line 1057 of file Chord.cc.
|
virtual |
updates information shown in tk-environment
Reimplemented in oversim::Koorde.
Definition at line 1382 of file Chord.cc.
Friends And Related Function Documentation
|
friend |
|
friend |
Member Data Documentation
|
protected |
|
protected |
|
private |
|
protected |
|
protected |
|
protected |
missing StabilizeCall msgs
|
protected |
|
protected |
|
protected |
|
protected |
The documentation for this class was generated from the following files:
